微型行星齒輪減速器是一種具有微小化特性的行星齒輪傳動裝置,輪齒一般采用小模數(m<1)漸開線圓柱齒輪。太陽輪使用剛性材料,傳動平穩、結構緊湊、體積微小,可適用于各精密儀器、電動裝置、操作機構和機器人系統等設備。微型行星齒輪減速器可作為電機輸出軸的減速增扭、傳遞動力裝置,是一個理想的可用于微小設備下的微型機電控制機構,在油氣管道行業、天然氣工業以及機械手行業等具有重要地位。
行星齒輪減速器在傳動中使用了功率分流性、輸入輸出同軸向性和內嚙合,具有許多獨特的優勢,適用范圍非常廣泛。世界上有許多國家高度重視行星減速器,深入研究其發展、應用,在行星減速器的結構優化、傳動比優化、轉矩優化和傳動性能優化等方面提出了很多新技術。國內外學者對行星齒輪的設計仿真也一直沒有停歇,且近年得到了大力發展。Parker建立了行星輪系純扭轉動力學模型,分析了行星輪系的固有特性。Kahraman對行星齒輪的固有頻率和振型進行了相關研究。隨著計算機性能的不斷提升,使用計算機進行設計仿真節約了大量時間,且計算精度不斷提高。Guo以直升機行星齒輪系統為研究對象,借助有限元軟件進行動力學分析,分析了直升機行星齒輪系在一定運行速度和轉矩條件下的動態響應、模態分析和諧響應分析。
水平井是一種由垂直段和水平段組成的油氣井,在過渡段井斜度大于 86°。相較于普通油氣井,井下測量取芯工具無法直接依靠重力到達指定的工作位置,必須依靠特定的井下爬行儀器把測量取芯工具運送到指定工作位置。由于井下空間有限,爬行器結構受到尺寸等因素的影響,爬行機構內的減速器只能選用小模數、小尺寸、大減速比的微型行星齒輪減速器。本文選用某井下取芯機器人爬行機構內的微型行星齒輪減速器為研究對象,設計行星齒輪輪齒參數,根據行星齒輪參數確定減速器機架參數,并使用 Solidworks 對其進行三維建模和裝配,再利用分析軟件對模型進行模態分析和諧響應分析。
一、利用 Solidworks 建立三維模型
根據需要設計行星齒輪減速器減速比為 5。由于爬行器外徑較小,設計減速器尺寸不能太大。按照需求選取行星齒輪結構為 2X-A 型單級行星減速器,太陽輪輸入轉速 2800r/min,經減速器減速達到爬行器需要的驅動輪速比。
根據需求選取傳動比和太陽輪齒數,根據配齒式(1)計算內齒輪齒圈齒數:
按照式(2)可計算出行星輪的齒數:
對計算的減速器各齒數進行傳動比、同心、鄰接條件驗算,并初步計算齒輪嚙合中心距,根據齒面接觸強度的計算公式計算太陽輪的分度圓直徑:

其中,Kd 為算式系數,KA 為使用系數,KH∑ 為綜合系數,KHp 為載荷分配不均勻系數。
在已知太陽輪齒數的情況下,可以確定齒輪模數 m 和中心距 a,并根據公共中心距選取各齒輪的變位方法,由式(4)計算中心距變動系數:
變位系數和為:
根據分配公式(6)將變位系數和分配給各齒輪后,即可確定減速器所有齒輪的參數。

考慮到井下高溫高壓的工作環境,中心輪的材料選取為 C45,調質處理后其抗拉強度 σLim=580GPa,彈性模量 200GPa,泊松比 0.3。內齒輪和行星輪選用42CrMo,其材料彈性模量為 206GPa,泊松比 0.3,密度 7.85kg/m3 。
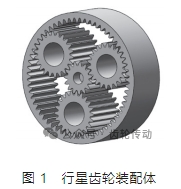
使用 Solidworks 建立行星減速器的三維模型,以太陽輪作為輸入軸輸入轉速,內齒輪齒圈與機架外殼連接固定,行星架設置為浮動,并在行星輪的帶動下輸出扭矩,建立實體模型。具體齒輪參數如表 1 所示。

裝配過程中,需要注意齒輪間的齒輪配合關系,如每個行星輪需要與內齒輪齒圈和太陽輪同時嚙合,且嚙合度需保持合適,防止發生齒輪干涉。建立實體模型時,由于采用行星架浮動作為輸出軸,太陽輪固定作為輸入軸的模式,需要使太陽輪采用兩端支承的方式,所以在輸入軸一端選用向心球軸承,另一端采用滾針支承的方式由行星架插入太陽輪上的支撐孔。行星輪采用向心球軸承與行星架連接,內齒圈固定在機架上,裝配后如圖 1 所示。
在設計和裝配行星齒輪后,根據裝配尺寸完成對機架的尺寸計算,并在 Solidworks 中進行三維建模。為了減少行星齒輪的軸向尺寸,行星輪采用向心軸承的支承結構。這使行星架在傳動中需要具有足夠的強度和剛度,以保證行星輪在傳動中有很好的動平衡性和載荷均布性能。在選用行星架結構時,選擇雙側板結構的轉臂,以保證行星齒輪安裝方便,且傳遞轉矩平穩。
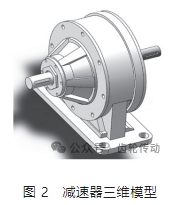
行星齒輪機架是各個齒輪和行星架的安裝基礎,在設計機架時需要綜合考慮安裝工藝、制造成本以及維護方便等因素。本文根據行星齒輪傳動軸大小、軸承選擇等設計機架,其裝配如圖 2 所示。設計的減速器用于井下爬行機器人,井下環境復雜多變,混合有多種油氣、泥沙、巖塊的混合液體,對爬行器有很大影響,而且井下屬于高溫高壓環境,需要爬行器密封性能優良,所以設計機架時對機架做出了一些省略,包括機架通氣孔、油標以及放油塞等。
二、有限元模態學分析
模態強度理論
模態分析是一種結構動力學分析方法,可以計算某一結構的固有頻率、阻尼和模態振型,將結構的線性振動微分方程進行坐標變換,從而求出結構的模態參數。模態動力學運動方程式為:
式中,[M]、[C]、[K] 分別為質量矩陣、阻尼矩陣、剛度矩陣, ![]() 分別為加速度、速度、位移響應向量,F(t) 為 N 維激振力。
分別為加速度、速度、位移響應向量,F(t) 為 N 維激振力。
在進行模態分析時,系統自動將式(7)進行模態坐標變化,變化運動方程為:
使用變化運動方程(8)進行線性組合,得:
模態分析結果
本文利用 workbentch 的模態分析法,考慮行星減速器在無載荷情況下的固有頻率特性。將模型導入模態分析模塊,使用系統自動化劃分網格。由于模態分析不需要加載荷,故只需要給減速器底座 4 個螺栓孔加載固定約束,再分析設置選擇提取前 10 階模態,計算后結果如表 2 所示。
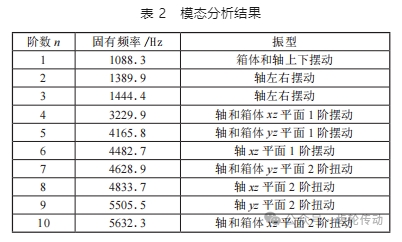
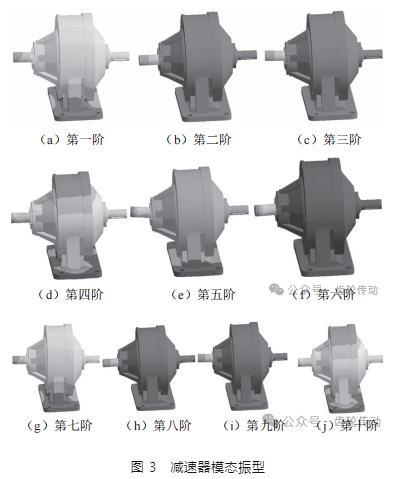
圖 3 為裝配體前 10 階振型圖。可以看出,由于軸長的原因,軸在每一階固有頻率都會發生振動。隨著階數的上升,振動幅度也越來越大。
三、輪齒諧響應分析
諧響應分析是一種在簡諧載荷作用下物體隨之響應的分析技術,關注物體隨外部載荷作用的動態響應。諧響應運動方程為:
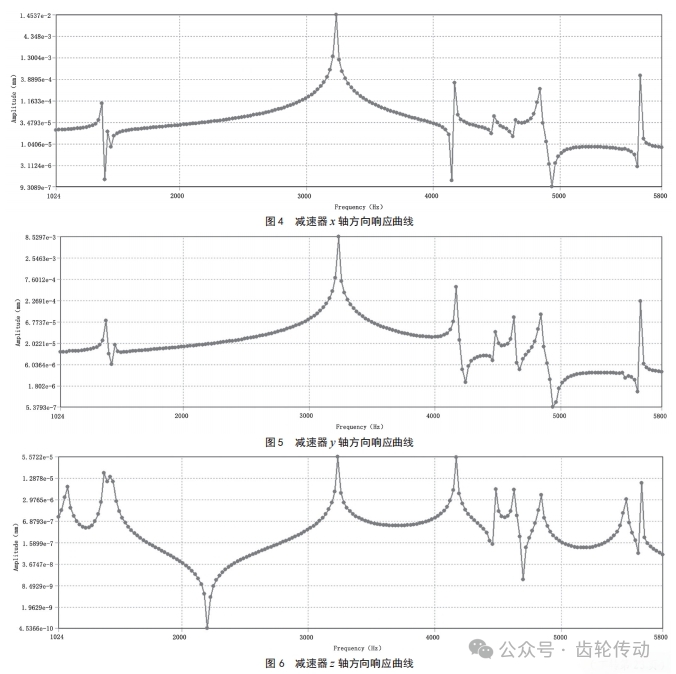
根據計算的減速器固有頻率,設置諧響應分析響應頻率,加載外部激勵為軸向轉矩,計算減速器在各級頻率下的響應曲線,并查看最大響應頻率。圖 4、圖 5 和圖 6 分別為減速器在 x 軸、y 軸和 z 軸的響應曲線,在第 4 階頻率達到 3229.9Hz 時,減速器在 xyz 軸都有最大響應;在 z 軸由于有切向轉矩的作用,在 5 階高頻 4165.8Hz 時也產生了最大響應。這和模態分析結果基本一致,在 4 階頻率下減速器表現為整體的左右擺動,因此 3 個方向都有響應;而在 5 階頻率下表現為軸的上下擺動,箱體有小擺動,因此在z方向有最大響應,而 xy 方向響應沒有達到最大。
四、結語
微型小模數行星減速器作為井下精密器械的減速器,是今后發展微型機械的重要方向。本文選用某井下爬行機器人驅動機構中的行星齒輪減速機構作為研究對象,設計齒輪參數并進行三維建模和裝配,利用 ANSYS 仿真對行星減速器的固有頻率和模態進行計算,分析其在運動過程中的響應,為以后行星齒輪優化設計提供了有效依據。
(1)根據減速器的工作環境,使用行星齒輪計算公式設計減速器各齒輪的模數、齒數、變位系數等,確定所有參數后使用 Solidworks 進行三維建模和裝配。
(2)用 ANSYS 有限元分析軟件對減速器進行模態分析,簡要分析減速器的各階固有頻率和振型,查看減速器在各階頻率下可能發生的變形情況;對減速器進行諧響應仿真,查看在外部激勵載荷的作用下減速器最能發生共振的情況。通過分析,減速器在頻率達到 3229.9Hz、4165.8Hz 時會產生最大響應,說明在這兩個頻率下影響最大。
參考文獻略.