最近幾年,純電動汽車得到了政府和人們的高度關注,許多新型技術也隨之而來。其中快速傳動結構效率的集成電驅動系統儼然成為汽車相關領域研究的熱點,國內外知名的企業和研究機構都在著重研究這方面,并且取得了不小的進展。
本文主要解決差速集成裝置的設計研究,并通過仿真測試對其整車的動力、經濟性影響,是否滿足整車的工況,試驗驗證了所設計的集成驅動系統結構方案的合理性,實現了集成驅動系統的目的。
1、集成式差速器的總體方案設計
根據項目設計需求,選取市面上成熟車型進行參考,匹配成熟電機、電池、設計匹配差速集成裝置。
設計的難點為差速器內部結構設計,以及如何將動力均勻的分配到驅動輪。本文就差速集成裝置設計予以說明。
減速器傳動機構方案
主減速器的傳動方案主要為四種:
1)螺旋錐齒輪傳動
2)雙曲面齒輪傳動
3)圓柱齒輪傳動
4)蝸輪蝸桿傳動
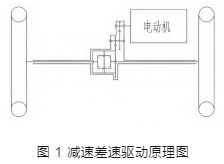
一級圓柱齒輪減速器,通過主減速器主動齒輪和主減速器從動齒輪帶動差速器,以達到汽車正常行駛的目的。具體如圖 1 所示。
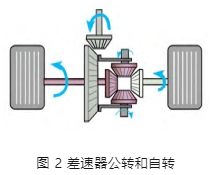
差速器原理
差速器工作原理是通過傳動軸帶動主動齒輪轉動,從而使環齒輪轉動,帶動半軸轉動。在汽車平穩直線行駛時,行星齒輪不轉動,兩個驅動輪的轉速相同 , 左右側齒輪的轉速也相同 , 中間的行星齒輪不自轉 , 只在左右側齒輪之間公轉。在汽車轉彎時,在行星齒輪的轉動下,改變汽車的行駛方向,從而完成汽車的轉向工作。相比其他差速器,該裝置具備結構簡單,行駛平穩等特點。
按結構不同劃分,差速器主要分為四類:
1)齒輪式,汽車上大多數采用的是對稱錐齒輪式差速器 , 具有結構簡單、質量小等優點。
2)凸輪式,比較常見的是滑塊齒輪式差速器, 是一種高摩擦自鎖差速器, 結構緊湊、質量小、但結構較復雜。
3)蝸輪式,是一種高摩擦自鎖差速器, 這種差速器結構復雜, 制造精度高, 所以應用不是很廣泛。
4)牙嵌式,牙嵌式是自鎖式差速器的一種, 工作可靠, 使用壽命長, 鎖緊性能穩定 , 制造也不是很復雜。
通過上述比較,選擇對稱式錐齒輪差速器。
差速器直齒錐齒輪計算
計算如表 1 所示。

2、仿真測試
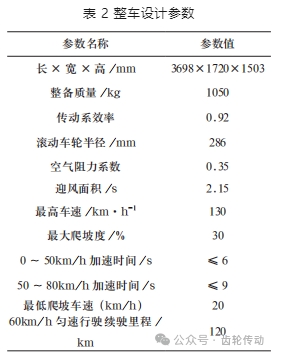
整車設計參數如表 2 所示。
汽車動力仿真模型的建立,如下圖 3 所示。

參考實車行駛狀態建立仿真模型,模型主要體現駕駛循環道路、車輛狀態、動力總成及負載、電源總線以及能量存儲裝置。
確定輸入的參數正確之后,出來的結果是關于電機和電池工況的放電和汽車速度、續駛里程、爬坡度的仿真結果。如下圖 4 所示。

通過此圖可知,汽車 0km/ h ~ 50km/h 的加速時間為 5.9s,50km/h~80km/h加速時間為 4.8s。仿真最高速度為 150m/s,大于設計值 130m/s,表明電機的峰值功率和電池的最大放電功率滿足車輛行駛要求。綜合以上信息,車輛的動力總成選型匹配滿足汽車的正常行駛及續駛里程設計要求。
3、結論
經過以上設計及試驗驗證可得到以下結論:
1、差速集成的選擇需要綜合考慮電機、電機端連接、電池以及車輛的用 途。
2、設計選形過程中要綜合對比各種傳動方式的優缺點,選擇最合適的傳動方式。
3、經過驗證,此結構簡單,適用于日常通勤的乘用車輛。
參考文獻略.