1、前言
機械式自動變速器(Automatic Mechanical Transmission,AMT)是車輛動力域的重要組成部分,其發生故障后仍可繼續有效工作是保障車輛正常行駛的重要因素之一。因此,在進行故障診斷測試時,需對其故障應對準確性、有效性進行驗證。
高文娟等基于 dSpace仿真系統對變速器控制器基礎軟件(Basic Software,BSW)層故障進行了診斷測試,葉欣等結合自動化測試軟件實現了 AMT 故障診斷測試的自動化運行及測試報告自動生成,趙海英等基于統一的診斷服務(Unified Diagnostic Services,UDS)開發了金屬帶式無級變速器(Continuously Variable Transmission,CVT)故障診斷系統,并對CVT的診斷策略和UDS診斷通信進行了試驗驗證,孟麗莎公開了一種基于硬件在環的汽車自動化測試系統及方法,通過控制器局域網(Controller Area Network,CAN)工具和測量標定工具進行了激活診斷測試,趙裕聰搭建基于 CAN 總線的故障診斷測試工具,對自動變速器故障進行了自動化診斷測試。上述研究表明,變速器控制單元(Transmission Control Unit,TCU)故障診斷測試主要通過不同故障注入方式實現,且主要集中于 BSW 層,對應用軟件(Application Software,ASW)層關注較少。
本文以 AMT 前副箱卡滯故障為例,基于已搭建的 AMT 硬件在環(Hardware-in-the-Loop,HiL)測試系統,結合自動化測試軟件搭建自動化測試序列,實現高速行駛工況下的正常換擋、無故障 應對條件下換擋和故障應對條件下換擋工況測試。
2、測試系統
測試系統主要包括待測的 TCU、仿真硬件平臺、已校準的被控對象模型和試驗管理軟件,如圖1 所示。

仿真硬件平臺由實時硬件系統、外圍硬件、可編程電源和電源管理模塊等組成。其中,實時硬件系統包含 NI PXIe-1084 機箱 1 個、PXIe-8880RT 實時處理器板1塊、PXIe-8510/6CAN通信板卡1塊、數據采集(TB2710 型)或輸出板卡(TB2810 型)合計 6塊,用于提供實時模型運行的硬件環境;外圍硬件包含 TB4102型故障注入板卡 8塊和 TB6201型電源切換板卡,用于實現故障注入和電源切換;可編程電源和電源管理模塊包含 EA PS9040-120 3.0 kW 進口可編程電源及電源分配單元(Power Distribution Unit,PDU),用于提供設備用電和保證用電安全 。
被控對象模型是測試系統整車模型(包含被控對象模型、虛擬發動機模型、輸入輸出模型和車輛模型)中的一部分,主要用于動力傳遞和改變傳動比。本文采用某12擋AMT,由離合器、前副箱、主箱和后副箱組成。
試驗管理軟件采用 NI VeriStand 系統,其可實現系統總線配置、系統硬件配置、系統模型配置和信號映射管理,并進行實時系統管理。
通過試驗管理軟件將編譯好的被控對象模型集成到仿真硬件平臺中,在管理軟件中可通過發送指令模擬駕駛員實車操作,此時,仿真硬件平臺發送數據至TCU并接收TCU輸出信號,實現對模型的控制和觀測,從而形成閉環系統。
3、故障診斷自動化測試
變速器箱體受潤滑油質量、零部件損壞等因素影響,可能出現換擋卡滯問題,導致無法正常換擋,進而影響車輛行駛。限于篇幅,本文以 AMT 前副箱低擋換擋卡滯故障為例,設計自動化序列并開展測試。前副箱低擋換擋卡滯故障需求如表 1 所示。
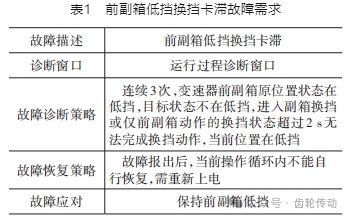
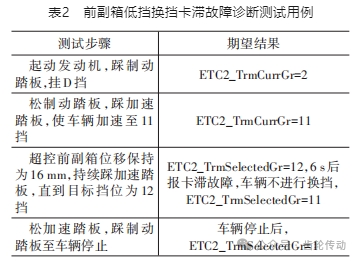
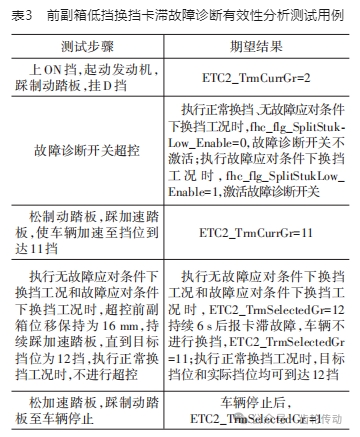
該 12 擋 AMT 奇數擋位時前副箱為低擋。由于高擋位時車速較高,換擋卡滯造成的危害加劇,本文以 11 擋時前副箱低擋換擋卡滯為例,故障診斷測試用例如表2所示。其中,ETC2_ TrmCurrGr 為當前擋位,ETC2_TrmSelectedGr 為目標擋位。
基于表1,使用自動化測試中圖形模塊化工具,并結合Python腳本編寫自動化測試序列,如圖2所示。
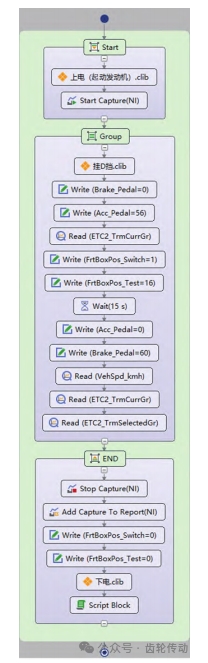
圖2 前副箱低擋換擋卡滯故障診斷測試自動化測試序列
該序列由開始(Start)、流程(Group)和結束(END)3 個部分組成,分別為上電和開啟模型數據記錄、故障診斷測試流程、記錄和分析數據。其中,clib 文件為封裝好的通用測試序列庫,可以被多個測試序列反復引用。上電(起動發動機).clib包含上電流程、起動發動機和確認TCU屬于默認初始狀態測試,下電 .clib 包含下電流程和重置 TCU 狀態測試,掛 D 擋 .clib 為掛入 D 擋測試。Script Block 為 Python 腳本,用于判定變速器前副箱在低擋是否持續6 s無法摘出(即故障診斷判斷時間)。
運行自動化測試序列,測試結果如圖 3 所示。其中,None表示無結果,Success表示成功。
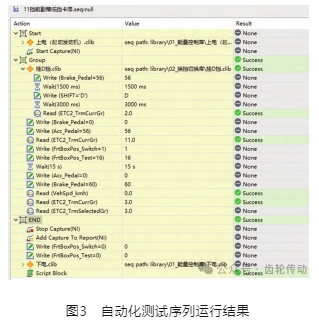
測試中每一次判定結果均為成功,表明該自動化測試序列測試通過,故障應對符合預期,證明了測試序列和 11 擋擋位下前副箱低擋換擋卡滯故障診斷應對的準確性。
通過以上方法,可將AMT故障診斷測試用例轉化為對應測試序列。在進行TCU故障診斷測試時,只需在更換TCU軟件后運行該序列,即可自動完成故障診斷測試并生成測試報告。
目前,基于本文搭建的測試系統,可實現 ASW 層故障(如電磁閥類故障、傳感器類故障、功能類障和總線故障)、BSW 層故障(如電磁閥電氣故障、傳感器電氣故障、系統供電故障和 CAN 通信故障)的自動化測試,自動化程度達100%。
4、故障診斷有效性分析
搭建高速行駛工況下正常換擋、無故障應對條件下換擋和故障應對條件下前副箱低擋換擋3種工況,不同工況下的測試用例如表 3 所示。其中,fhc_flg_SplitStukLow_Enable為前副箱低擋換擋卡滯故障開關標定值。
根據該測試用例改進原有測試序列,利用具體測試用例(Concrete Test Case,CTC)功能實現一條測試序列完成3種工況測試,具體測試序列如圖4所示。
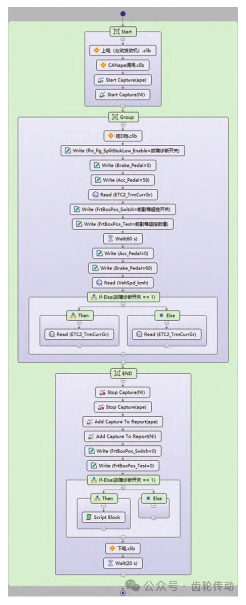
圖 4 不同工況下 AMT 前副箱低擋換擋卡滯故障診斷測試自動化測試序列
相較于圖2,圖4測試序列新增點如下:
a. Start 部分:新增第 2 行 CANape 調用 .clib,作用為調用 CANape 工具 ,新增第 3 行開始記錄 CANape數據操作,用于調用TCU內部狀態量。
b. Group部分:新增故障診斷開關、前副箱超控開關和前副箱超控數值等本地變量;新增第 2 行故障診斷開關,用于打開或關閉故障診斷功能;修改第7行和第8行,設置前副箱超控開關、前副箱超控數值為本地變量,用于適配 CTC;修改第8行,等待時間由 15 s 調整為 60 s,以更好地對比不同工況下的車速變化;修改第12行,根據工況不同,車輛停止時擋位判斷不同。
c. END 部分:新增第2行和第3行,記錄 CANape變量數據并添加到報告中;新增第7行工況判斷,只有在故障診斷開關激活時,才對故障診斷時間進行判斷。
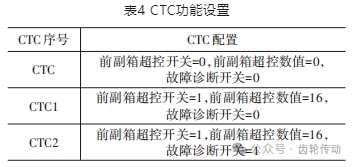
其中,本地變量適用于CTC功能,通過不同CTC 可對本地變量進行賦值,從而實現不同工況測試,如表 4 所示,CTC、CTC1 和 CTC2 分別對應正常換擋、無故障應對條件下換擋和故障應對條件下前副箱低擋換擋工況。
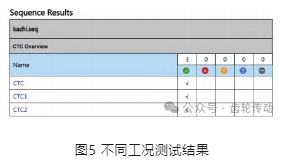
執行圖 4 中測試序列,測試結果如圖 5 所示。由圖5可知,正常換擋、無故障應對條件下換擋和故障應對條件下換擋工況測試均通過。
不同工況下車速、當前擋位和目標擋位對比結果如圖 6所示。由圖 6可知:正常換擋工況下,由于換擋離合器脫開等原因,車輛在由11擋升12擋時,車速先下降一段后持續正常提高;無故障應對條件下換擋工況中,在由11擋升12擋時,卡滯原因導致無法正常換擋,車速持續降低,無法回到原有加速狀態,將導致車輛最終停止;在故障應對條件下,車輛在經過 6 s的故障診斷時間后,車速雖然降低,但可以恢復到原有加速狀態,之后車速變化趨勢與正常換擋工況類似。
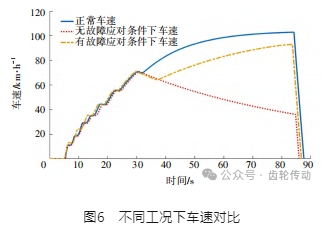
對比3種工況,結果表明,前副箱低擋換擋卡滯故障應對準確,同時可滿足恢復車輛狀態的需求,證明了該應對的有效性。
5、結束語
本文基于已搭建的 HiL 測試系統,結合自動化測試軟件設計了 AMT 前副箱低擋換擋卡滯故障自動化測試序列并進行測試,結果表明,該測試序列可以滿足 11 擋時前副箱低擋換擋卡滯故障診斷及應對測試。同時,基于該測試序列完成了高速行駛工況下正常換擋、無故障應對條件下換擋和故障應對條件下前副箱低擋換擋工況的自動化測試,結果表明,高速行駛工況下,發生前副箱低擋換擋卡滯故障后,車輛仍可恢復原有加速狀態,證明了故障診斷應對的有效性。
基于以上方法可以進行不同故障診斷的自動化測試及有效性分析,如閥體長時間激活、報文故障和傳感器異常等,從而更加全面地驗證AMT故障診斷的有效性。同時,可以結合實際道路工況,在不同工況下注入不同故障,從而模擬車輛在實際道路行駛過程中,AMT故障條件下的故障診斷及應對過程。
參考文獻略.