近年來,風(fēng)電作為一種可再生能源發(fā)展迅速,隨著其累計和新增風(fēng)機(jī)裝機(jī)容量的不斷增長,其運(yùn)維問題也日益突出。研究表明,齒輪箱作為風(fēng)力發(fā)電機(jī)組最重要的傳動部件之一,一旦發(fā)生故障會導(dǎo)致較長的維修停機(jī)時間,產(chǎn)生較高的維修成本。因此,研究如何有效監(jiān)測風(fēng)電機(jī)組齒輪箱運(yùn)行狀態(tài)、實(shí)現(xiàn)故障預(yù)警,對保證風(fēng)電機(jī)組安全穩(wěn)定運(yùn)行和降低風(fēng)電場運(yùn)維成本具有十分重要的現(xiàn)實(shí)意義。
目前,針對風(fēng)電機(jī)組齒輪箱的監(jiān)測主要有振動狀態(tài)監(jiān)測、聲發(fā)射監(jiān)測以及油液潤滑狀態(tài)監(jiān)測。其中,針對油液潤滑狀態(tài)的監(jiān)測可以分為對潤滑油理化性能的監(jiān)測和對油液中磨損顆粒的監(jiān)測。研究表明,齒輪箱的故障大多發(fā)生在軸承和齒輪上,兩者在運(yùn)行過程中均會產(chǎn)生磨損顆粒。其產(chǎn)生磨損顆粒的數(shù)量、大小及形貌能夠反映齒輪箱的運(yùn)行狀況及其傳動部件之間的磨損情況。通常,齒輪箱正常運(yùn)行時產(chǎn)生的磨損顆粒大小約在 1 ~ 10 µm 之間,而當(dāng)齒輪箱進(jìn)入異常狀態(tài)時,可以檢測到 10 ~ 50 µm 之間的磨損顆粒。當(dāng)磨損顆粒的尺寸超過 100 µm 時,則認(rèn)為設(shè)備處于臨界狀態(tài),具有較高的故障風(fēng)險。因此,對油液中磨損顆粒的監(jiān)測能夠幫助了解齒輪箱軸承及齒輪的磨損狀況,適合為風(fēng)電機(jī)組齒輪箱的故障提供早期預(yù)警。
針對潤滑油磨損顆粒的監(jiān)測技術(shù)可以分為離線檢測方法和在線檢測方法。離線檢測方法主要有鐵譜分析法、光譜分析法、顆粒計數(shù)法等,具有靈敏度高、檢測精度高等優(yōu)勢,但同時也存在成本高、 檢測滯后性、取樣要求高等缺點(diǎn)。目前,在線檢測方法主要依賴在線磨損顆粒傳感器進(jìn)行,根據(jù)工作原理不同,可以將其分為光電型、導(dǎo)電型、電磁型和超聲波型等。光電型磨粒監(jiān)測傳感器靈敏度最高(> 5 µm),但難以區(qū)分鐵磁性顆粒和非鐵磁性顆粒,測量效果易受油液透明度和氣泡的影響,且不適合大流量測量環(huán)境。導(dǎo)電型磨粒監(jiān)測傳感器靈敏度相對較高,MURALI 等研究了一種檢測和計數(shù)非導(dǎo)電潤滑油中微量磨損顆粒的裝置,能夠測量 10 ~ 25 µm 的磨損顆粒。但該類型傳感器存在無法區(qū)分磨粒材質(zhì),易受油液理化性能(如酸值、黏度)及水滴影響等缺點(diǎn)。超聲型磨粒監(jiān)測技術(shù)能夠區(qū)分固體碎屑和氣泡,但靈敏度較低(> 45 µm),無法區(qū)分金屬和非金屬顆粒,且檢測區(qū)域聲場的不均勻性會影響粒徑估算的準(zhǔn)確性。DU 等設(shè)計了一種由超聲脈沖傳感器和電感式脈沖傳感器組合而成的磨損顆粒傳感器,能夠區(qū)分檢測非金屬、黑色金屬和有色金屬顆粒。電磁型磨粒監(jiān)測技術(shù)應(yīng)用最廣,可區(qū)分鐵磁性顆粒和非鐵磁性顆粒,檢測效果不受氣泡和水滴的影響,但通常只能測量 100 µm 以上的磨粒。為了提高此類傳感器的靈敏性,WU 等設(shè)計了一種基于微流控芯片的電磁型磨粒監(jiān)測傳感器,能夠檢測 5 ~ 10 µm 的小顆粒。然而微通道結(jié)構(gòu)在提高傳感器靈敏度的同時也限制了允許通過的流量,不利于在大型機(jī)械設(shè)備上的應(yīng)用。綜上所述,不同磨粒監(jiān)測技術(shù)各有其優(yōu)點(diǎn),也存在各自的局限性。
本文基于數(shù)字全息技術(shù)設(shè)計搭建能實(shí)時在線監(jiān)測潤滑油磨損顆粒的實(shí)驗(yàn)系統(tǒng)。通過模擬實(shí)驗(yàn)對含不同粒徑規(guī)格磨粒的潤滑油分別進(jìn)行測量,并將測量結(jié)果與激光粒度儀的離線測量結(jié)果進(jìn)行比較。另外,數(shù)字全息技術(shù)作為一種三維測量技術(shù),在測量磨粒粒徑的同時還可獲取其二維形貌信息,通過分析潤滑油中磨粒的形貌特征,能夠輔助判斷齒輪箱發(fā)生的磨損類型和磨損程度,對定位異常磨損位置、研究磨損機(jī)理等具有重要意義。
1、實(shí)驗(yàn)裝置與方法
實(shí)驗(yàn)裝置
實(shí)驗(yàn)系統(tǒng)總體結(jié)構(gòu)如圖 1 所示,主要由數(shù)字全息光路系統(tǒng)和潤滑油循環(huán)系統(tǒng)兩部分組成。
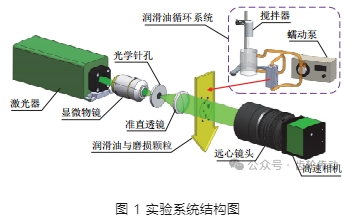
數(shù)字全息光路系統(tǒng)主要由激光器、濾波擴(kuò)束準(zhǔn)直系統(tǒng)、鏡頭和相機(jī)組成。激光器出射光首先經(jīng)過由顯微物鏡、光學(xué)針孔組成的空間濾波器,濾掉光束中的高頻噪聲,提高光束質(zhì)量,然后經(jīng)過準(zhǔn)直透鏡擴(kuò)束成平行光。平行光照射測量區(qū)域流道內(nèi)的待測潤滑油,潤滑油中磨粒的散射光與直透光干涉形成全息圖,被另一側(cè)的高速相機(jī)記錄。其中,所使用激光器由法國 OXXIUS 公司生產(chǎn),型號為 LCX-532,發(fā)射波長為 532 nm 的穩(wěn)定激光束;CCD 相機(jī)由德國 BASLER 公司生產(chǎn),型號為 acA2440-75uc,像素尺寸為 3.45 μm。相機(jī)前加裝了一個遠(yuǎn)心鏡頭,經(jīng)標(biāo)定實(shí)驗(yàn)系統(tǒng)實(shí)際的等效像素尺寸為 1.72 μm。
潤滑油循環(huán)系統(tǒng)主要由潤滑油箱、電動攪拌器、蠕動泵和測量區(qū)域流道組成,其間采用硅膠管連接各部件。潤滑油箱中裝有待測潤滑油樣,油液中含有一定數(shù)量的磨損顆粒。實(shí)驗(yàn)中所用潤滑油為適用于機(jī)械設(shè)備齒輪箱的 320 號工業(yè)齒輪油;磨損顆粒由不同細(xì)度規(guī)格的鐵粉顆粒替代;潤滑油的流速通過蠕動泵調(diào)節(jié),調(diào)節(jié)范圍為 0.1 ~ 510 mL/min;電動攪拌器使磨損顆粒均勻分散在潤滑油液中,轉(zhuǎn)速調(diào)節(jié)范圍為 100 ~ 3 000 r/min。
實(shí)驗(yàn)方法
實(shí)驗(yàn)采用對照的方法來驗(yàn)證數(shù)字全息技術(shù)在監(jiān)測潤滑油磨損顆粒上的可行性與測量準(zhǔn)確性。實(shí)驗(yàn)分為實(shí)驗(yàn)組和對照組,實(shí)驗(yàn)組由圖 1 所示的全息測量系統(tǒng)測量,對照組采用激光粒度儀測量。
實(shí)驗(yàn)組將不同細(xì)度規(guī)格的鐵粉顆粒與未使用的 320 號工業(yè)齒輪油以不同比例進(jìn)行配比作為待測油液樣本。所使用鐵粉顆粒的細(xì)度規(guī)格分別為 100、200、300、500 和 1 000 目,該細(xì)度規(guī)格僅作為鐵粉細(xì)度的大致參考。在待測油液樣本的具體配置過程中,控制每次油液容積均為 400 mL,改變加入其中的鐵粉規(guī)格及質(zhì)量使每組油液樣本中所含磨粒的大小和濃度均不同,具體組別與配比情況見表 1。
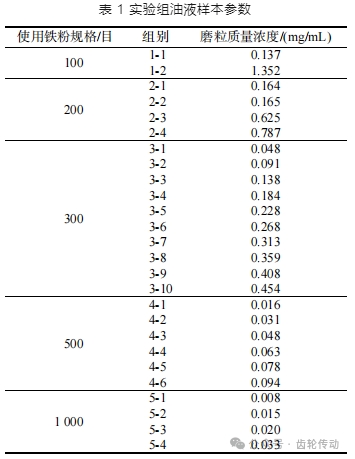
采用中國丹東百特公司研發(fā)的 Bettersize2600 型激光粒度儀(量程范圍 0.02 ~ 2 600 μm),分別測量 100、200、300、500 和 1 000 目鐵粉的粒徑分布。該組實(shí)驗(yàn)采用濕法測量模式,其中分散介質(zhì)的不同會影響鐵粉能否均勻分散在溶液里,從而影響測量準(zhǔn)確性。通用的分散介質(zhì)一般為去離子水、乙醇、甘油等。本實(shí)驗(yàn)選擇去離子水作為分散介質(zhì),六偏磷酸鈉作為分散劑,其與鐵粉無化學(xué)反應(yīng)且無毒無害,制備好的分散系統(tǒng)狀態(tài)穩(wěn)定,鐵粉顆粒無溶解 或集聚現(xiàn)象,能夠滿足測量要求。
數(shù)據(jù)處理
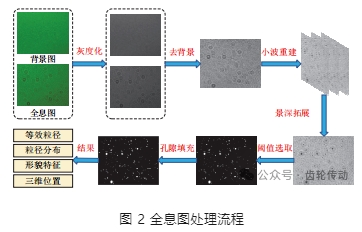
采集到潤滑油中的顆粒全息圖后,需先對全息圖進(jìn)行一系列圖像處理才能獲取所需要的顆粒信息,其主要過程為去噪、小波重建、景深拓展、顆粒識別、孔隙填充等。全息圖處理具體流程如圖 2 所示。
1.預(yù)處理
在預(yù)處理過程中,首先需要預(yù)先記錄潤滑油未流過測量區(qū)域時的空白全息圖作為背景圖 Ibg(x, y) 。后續(xù)將待處理全息圖 Ior(x, y)[圖 3(a)]及背景圖灰度化,并通過背景相減法進(jìn)行去噪處理:
式中:下標(biāo) bd 表示去噪后的全息圖,or 表示原始待處理全息圖,bg 表示空白背景全息圖。
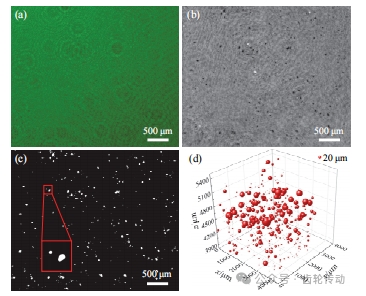
圖 3 (a)原始全息圖;(b)景深拓展圖;(c)二值化圖像;(d)磨粒在測量體積內(nèi)的三維分布
2. 全息重建
采用小波重建方法對去噪后的全息圖進(jìn)行重建。在基于線性不變系統(tǒng)的小波重建算法中,重建圖像的光強(qiáng) I(x ,y,z) 可表示為:
式中:Ibd (x, y) 為去噪后全息圖的強(qiáng)度分布,ψα (x, y) 為校正的小波函數(shù);α = (λz/π)1/2 為尺度參數(shù);σ為窗函數(shù)的帶寬因子。調(diào)零參數(shù)Mψ =σ2/(1+σ4),使得ψα ( x, y) 平均值為零。采用上述重建方法,可獲得一系列不同深度的重建圖像。
3. 景深拓展
為了便于分析顆粒信息,采用基于小波分解的景深拓展方法將不同深度的重建圖像合成為一張景深拓展圖,如圖 3(b)所示,使所有顆粒以聚焦形態(tài)呈現(xiàn)。
4. 二值化
獲得景深拓展圖后通過設(shè)置亮度閾值將顆粒識別出來,生成二值化圖像,如圖 3(c)所示。采用全局閾值法,即設(shè)定一個全局亮度閾值 Ith ,對 Iefi 進(jìn)行二值化處理:

式中:下標(biāo) th 表示設(shè)定的閾值,efi 表示景深拓展圖,bw 表示二值化結(jié)果。
5. 顆粒信息獲取
通過計算機(jī)圖像處理技術(shù)可以將二值化圖像進(jìn)行孔隙填充,計算顆粒等效粒徑,統(tǒng)計粒徑分布,定位顆粒三維位置,如圖 3(d)所示,獲取顆粒形貌特征參數(shù)等。
對于磨粒等效粒徑的表征,本文采用等效面積圓直徑來進(jìn)行計算,其計算公式為:

式中: A 為顆粒圖像的面積,通過顆粒占據(jù)的像素點(diǎn)數(shù)目來求取。
2、實(shí)驗(yàn)結(jié)果與分析
粒度分布測量結(jié)果比較
通過圖像處理算法對所有全息圖完成處理后,依據(jù)測量方法和使用的鐵粉規(guī)格不同,分組統(tǒng)計所有有效顆粒。根據(jù)各組顆粒的等效粒徑,以體積分布繪制了實(shí)驗(yàn)組、對照組的粒度累積分布曲線,結(jié)果如圖 4 所示。
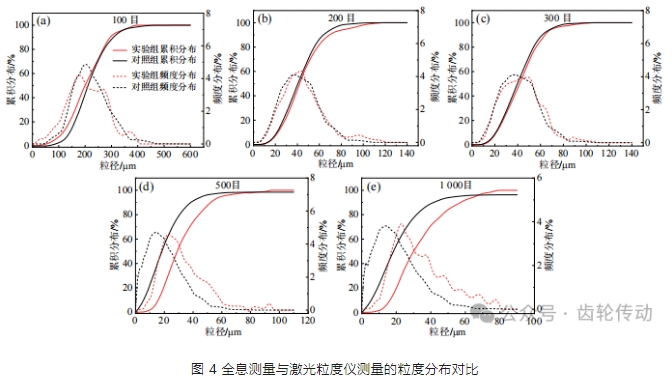
從各組的粒度累積分布曲線來看,對于較大磨粒(100、200、300 目)的測量,如圖 4(a ~ c)所示,兩種測量方法所得出的粒度累積分布曲線的形態(tài)相當(dāng)接近,表明全息系統(tǒng)的測量結(jié)果與激光粒度儀的測量結(jié)果一致性較高;而對較小磨粒(500、1 000 目)的測量,如圖 4(d、e)所示,激光粒度儀測得的粒徑分布結(jié)果顯示 0 ~ 20 μm 的磨粒占比超過了 50%,明顯大于全息測量方法的測量結(jié)果。
為了更好地比較兩種測量系統(tǒng)在粒徑測量結(jié)果上的差異,引入顆粒粒徑分析中典型的指標(biāo) Dv50 來進(jìn)行分析。Dv50 是指樣品的累計粒度分布百分?jǐn)?shù)達(dá)到 50%時所對應(yīng)的粒徑,也被稱為中位徑或中值粒徑,可以用來表示粉體的平均粒度。分別對實(shí)驗(yàn)組和對照組的數(shù)據(jù)計算中位徑 Dv50,結(jié)果見表 2。
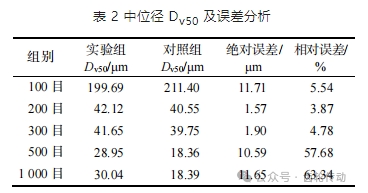
從表 2 中可以看出,在測量 500 目和 1 000 目鐵粉時,實(shí)驗(yàn)組與對照組的 Dv50 誤差較大,絕對誤差分別為 10.59 μm 和 11.65 μm,相對誤差分別達(dá)到了 57.68%和 63.34%。該誤差的產(chǎn)生一方面可能是由于激光粒度儀對小顆粒(0 ~ 20 μm)占比的高估。有研究表明,分別采用篩分法和光散射法測量煤 粉粒度,在小粒徑(< 20 μm)范圍內(nèi)激光粒度儀會高估小顆粒的占比,造成整體測量結(jié)果偏細(xì)。而另一方面由于系統(tǒng)分辨率的限制,圖像法在數(shù)據(jù)處理的過程中容易產(chǎn)生誤差。本實(shí)驗(yàn)中,實(shí)驗(yàn)組系統(tǒng)拍攝到的圖像的單位像素尺寸為 1.72 μm,而經(jīng)過圖像識別后顆粒的整體像素點(diǎn)數(shù)目會受到成像質(zhì)量以及亮度閾值選取的影響,從而引入誤差。針對小顆粒而言,由于原本所占的像素點(diǎn)較少,則更容易把誤差放大化。
整體而言,基于數(shù)字全息技術(shù)搭建的潤滑油磨粒監(jiān)測系統(tǒng)能夠覆蓋磨粒監(jiān)測需求的粒徑測量范圍并具有良好的測量準(zhǔn)確性。雖然對小顆粒的測量存在一定的誤差,但考慮到 0 ~ 20 μm 范圍內(nèi)的小顆粒基本屬于潤滑油中的正常磨損顆粒。針對風(fēng)力發(fā)電機(jī)組齒輪箱潤滑油磨損顆粒的監(jiān)測重點(diǎn)在于對較大異常磨損顆粒的準(zhǔn)確識別,小顆粒的測量誤差對測量系統(tǒng)整體的功能實(shí)現(xiàn)影響不大。因此,基于數(shù)字全息技術(shù)的潤滑油磨粒監(jiān)測方法在磨粒在線監(jiān)測領(lǐng)域依然具有相當(dāng)廣闊的應(yīng)用前景。
磨粒濃度影響分析
在風(fēng)電齒輪箱潤滑油磨粒監(jiān)測的過程中,潤滑油中含有的磨粒數(shù)量會隨著風(fēng)電機(jī)組的運(yùn)行時間逐漸增多。磨粒濃度的改變是否會對全息測量的準(zhǔn)確性產(chǎn)生影響是一項值得探究的內(nèi)容。
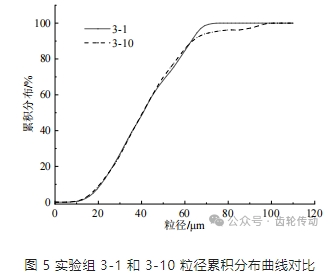
以測量 300 目規(guī)格鐵粉的實(shí)驗(yàn)組為例,共計 10 組,每組油液的磨粒濃度逐漸增加,具體配比情況已在表 1 中列出。其中,顆粒濃度較低的 3-1 實(shí)驗(yàn)組待測油液樣本的磨粒質(zhì)量濃度約為 0.048 mg/mL,顆粒濃度較高的 3-10 實(shí)驗(yàn)組待測油液樣本的磨粒質(zhì)量濃度約為 0.454 mg/mL,兩者的磨粒質(zhì)量濃度相差近 10 倍。
分別統(tǒng)計實(shí)驗(yàn)組 3-1 組和 3-10 組的磨粒粒徑分布情況,以體積分布繪制成粒度累積分布曲線,如圖 5 所示,兩者的粒度累積分布曲線形態(tài)接近。針對該兩組實(shí)驗(yàn)的數(shù)據(jù),分別計算其 Dv50,得到 3-1、3-10 實(shí)驗(yàn)組的 Dv50分別為 40.71、40.43 μm,兩者結(jié)果同樣相近。結(jié)果初步表明,全息測量系統(tǒng)在較低磨粒濃度下測得的磨粒粒徑結(jié)果與在較高磨粒濃度下測得的結(jié)果基本一致。
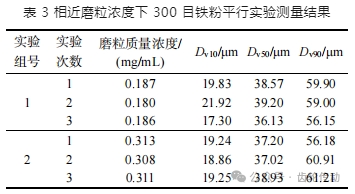
考慮到 300 目鐵粉本身存在一定的粒度分布差異,每次取樣可能存在一定的粒度偏差,因此對相近磨粒濃度的油液進(jìn)行了平行實(shí)驗(yàn),其結(jié)果見表 3。其中,第一組平行實(shí)驗(yàn)中的第三次實(shí)驗(yàn)所測得的 Dv10、Dv50和 Dv90指標(biāo)均略小于其他兩次實(shí)驗(yàn),第二組平行實(shí)驗(yàn)中的第一次實(shí)驗(yàn)測得的 Dv90 指標(biāo)也略微偏小。這證實(shí)了相同磨粒濃度下,不同次取樣的鐵粉存在一定的粒度差異,會導(dǎo)致最終測量結(jié)果相近但不完全相同。
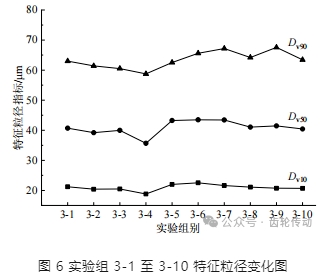
對測量 300 目規(guī)格鐵粉的 10 個實(shí)驗(yàn)組分別計算 Dv10、Dv50和 Dv90三個特征粒徑指標(biāo),如圖 6 所示。10 組實(shí)驗(yàn)所測得三個特征指標(biāo)雖由于鐵粉取樣偏差有所差異,但基本保持在一個相近的范圍內(nèi),隨著磨粒濃度的增加并沒有出現(xiàn)趨勢性的變化。實(shí)驗(yàn)表明,在潤滑油的磨粒濃度適用全息測量方法的前提下,潤滑油中磨粒濃度的改變對粒徑測量結(jié)果的影響不大。
磨粒形貌特征分析
數(shù)字全息技術(shù)除了能夠在線監(jiān)測風(fēng)力發(fā)電機(jī)齒輪箱潤滑油磨粒的粒徑,還能夠觀測磨粒的形貌。磨粒的形貌特征對判斷磨損類型、分析磨損機(jī)理等具有重要意義。例如,正常滑動磨粒通常呈圓形或 橢圓形,表面較為光滑,而嚴(yán)重滑動磨粒則通常呈多邊形或不規(guī)則形狀,表面存在明顯的切削痕跡。
借助圖像處理技術(shù),數(shù)字全息技術(shù)可實(shí)現(xiàn)對磨損顆粒周長、面積、凸包面積、長短軸、圓形度、扁平度、偏心率、棱角度、凹度等眾多形狀特征參數(shù)的監(jiān)測。如圖 7 所示,選取幾種形狀較典型的顆粒為例進(jìn)行形貌分析,部分參數(shù)的分析結(jié)果見表 4。
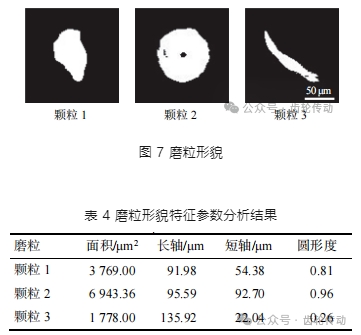
由于實(shí)驗(yàn)中潤滑油里的磨損顆粒實(shí)際為不同細(xì)度規(guī)格的鐵粉顆粒,并不是典型的磨損顆粒。目前難以通過磨粒的形貌特征對磨粒的磨損類型進(jìn)行識別判斷。后續(xù)對于實(shí)際的潤滑油磨損顆粒可以采用相同的形貌分析方法,提取其形貌特征參數(shù),結(jié)合神經(jīng)網(wǎng)絡(luò)、深度學(xué)習(xí)等算法來判斷顆粒的磨損類型,從而輔助判斷齒輪箱的磨損程度、磨損部位等。
3、結(jié)論
設(shè)計搭建了基于數(shù)字全息技術(shù)的風(fēng)力發(fā)電機(jī)組齒輪箱潤滑油磨損顆粒在線監(jiān)測系統(tǒng),對含不同粒度規(guī)格、不同濃度鐵粉顆粒的潤滑油樣本進(jìn)行了測量,并將測量結(jié)果與激光粒度儀的測量結(jié)果進(jìn)行對照,主要結(jié)論如下:
(1)搭建的全息測量系統(tǒng)對于較大磨損顆粒(> 20 μm)的測量與激光粒度儀的測量結(jié)果一致性較好,其中位徑 Dv50 測量誤差小于 6%;對 0 ~ 20 μm 的小顆粒測量誤差較大,但對實(shí)際異常磨損顆粒的監(jiān)測影響不大。
(2)在顆粒濃度處于適用全息測量方法的前提下,潤滑油中磨粒的濃度變化對粒徑測量結(jié)果的準(zhǔn)確性影響不大。
(3)數(shù)字全息測量技術(shù)能同步獲取磨粒二維形貌信息,在磨粒材質(zhì)識別、磨損類型區(qū)分、磨損機(jī)理分析、磨損部位定位等方面具有進(jìn)一步研究的價值。
參考文獻(xiàn)略.