工業機器人在汽車全工業鏈條中的地位非常重要。隨著我國人口老齡化的發展和人工成本的逐年上升。工業機器人正在成為汽車制造工廠中生產的主要來源。所以發展工業機器人對于中國制造2025戰略至關重要, 而工業機器人中有30%的都來自每個關節所安裝的 RV 減速器,RV 減速器是一種在極小的空間里滿足超大傳動比的減速器,同時它可以設計成中空的形狀,便于工業機器人的水、氣、電等管路的放置。
1、模態分析的意義與國內外相關研究
工業機器人目前在制造業領域應用廣,在汽車各個領域都有涉獵。應用最多的為汽車殼體沖壓,例如特斯拉一體式沖壓生產線,每個沖壓工位都需要三臺工業機器人同時參與工作。在噴涂和焊接基本上是無人作業,工業機器人完全取代人類來進行加工,人工只需要在工業機器人的日常檢修和意外停機的時候介入處理,其他時間完全自動生產。而根據相關的機構測算工業機器人的產值已經逐漸達到多少萬億,目前向著多少萬億逐漸前進。而市面上有名的工業機器人老牌廠商有許多相關企業,所以行業內前景廣闊。對一臺工業機器人拆解成本分析,其中占比最大的為系統、機體機構件、關鍵零部件,而最重要的關鍵零部件中,RV 減速器的成本占工業機器人最大。根據自由度不同,每個關節都需要一臺不同負載大小的 RV 減速器。而工業機器人用的 RV 減速器有一個特點,一旦在工廠內被安裝,一般來講在整個工業機器人的全生命周期內不需要拆卸維修,直至報廢。所以這對 RV 減速器的使用壽命提出了相當高的要求與挑戰。
查詢相關文獻李洋、許立新、侯昌興等在2023年6月提出了對一種新型活動柱銷式精密擺線減速器模態特性進行分析,獲得了減速器各階固有頻率和振型特征;最后,完成了活動柱銷式擺線減速器物理樣機制造并進行了傳動效率測試。丁國龍、詹明儒、趙大興等在2022年1月提出 RV-40E 減速器模態仿真與實驗研究,將 RV-40E 減速器與納博特斯克產品進行對比,得出二者差異,為后續研究提供一種思路。李顛、葉紅玲、苑博帥等在2022年3月提出小負載 RV 減速器擺陣針輪模態分析,并將其與擺線輪、針輪盤等進行對比,得出不同階數的值。但是目前對于大負載的 RV 減速器擺線針輪的振動問題還有待解決的部分,而工業機器人噪音振動最大處除了電機外,還包括 RV 減速器的運轉。所以本文針對 RV 減速器的共振問題運用有限元仿真分析了擺線針輪的固有頻率, 對得到的問題提出了相應的解決方案。
2、模態分析理論基礎
本文針對汽車生產線常見的工業機器人 RV 減速器的擺線針輪減速機構可能會出現的共振問題進行了深入的研究。運用有限元仿真進行了 RV 減速器的模態分析, 得到了約束狀態下的 RV 減速器擺線針輪低階前10階的正常工況下的運行頻率,與 RV 減速器整體的固有頻率進行對比,找到可能發生共振的頻率,并對其提出修改建議, 同時還對其激勵頻率進行計算,指出其發生共振的頻率, 提出了修改的方法,可供參考。
在實際的機械產品運行過程中常會發生振動、異常噪音、共振等問題,針對以上的現象對整機或者某一零部件進行模態分析是常見的一種仿真。模態就是整機或者零件不同結構的自身所固有或原有的振動特性。我們常見的零部件都屬于彈性體,它本身有相應的振動模態,進行模態分析會得到相對振幅比值、頻率、振型等相關參數與圖形。而我們根據每一階的幾個參數,對比整機或者其他零部件的頻率值,就可以得出模擬實際工況下該零件的共振問題。
然后根據問題點或者薄弱點進行相應的結構修改。同時這種共振源也分為內部結構或者外部激勵源,也可以得到相應的對比和設計參考。而這里提到的模態分析的階數也是從1階逐漸變大排列的,一般來講低階的頻率更有價值,也更能反映該零件的振動特性。
模態分析可以分為兩種,分別是有限元模態分析和實驗模態分析。有限元模態是采用有限元法對零件的振動施加相應的約束和受力等參數,得到零件的低階的模態分析結構,里邊包含了三種參數。而實驗模態通過搭建相關的實驗平臺,采用實際工況運行零部件用傳感器等檢測, 得到不同階數的三種參數,來與內部或者外部的激勵源進行對比驗證。
而用軟件分析的有限元模態分析,又可以分為自由模 態和約束模態,兩者的區別只是在于邊界條件設置的不同,自由模態一般是無約束的狀態,例如飛機、炮彈等物體。而約束模態指在不同的約束條件下計算的模態值,施加什么約束,施加多少要根據工程實踐來施加。
模態分析中常見的為自由模態和約束模態,本文采用的是有約束下的 RV 減速器模態分析。因為在 RV 減速器中二級傳動擺線針輪傳動有沖擊性載荷,振動易發生。我們選定 RV 減速器的 RV 擺線輪作為模態分析的對象。
3、大負載 RV減速器的模態分析設置
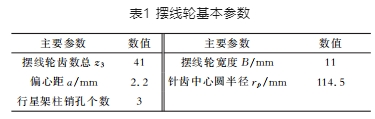
如表1為本文分析的擺線輪相關數據。
在三維建模軟件中將擺線輪的倒角等無關結構忽略掉, 減少計算量如圖 1 所示。
常采用的有限元軟件模態分析步驟,先將需要模態分析的零部件在三維建模軟件中處理掉跟計算無關的一些次要結構,再將其轉變為有限元分析軟件可以識別的格式。用有限元軟件打開后,按照實際工況施加零件材料、受力、約束等邊界條件。選擇網格劃分的類型和密度或者一些特殊的網格劃分形式,這關系到計算結果的準確性。然后設置基本的計算階型進行模態分析計算,得到最終的三個參數和結果。
將參數自動生成的文件保存成相關的通用格式,使用 Workbench打開擺線針輪有限元文件,并對其進行約束狀態下的模態分析。
RV320型號的擺線針輪常用的機體材料型號為 GCr15。
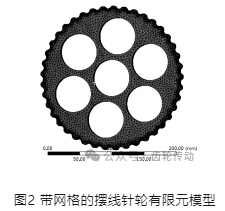
網格劃分實施默認網格劃分,每個網格大小為4mm。擺線針輪齒廓處形狀比內部復雜,所以對齒輪邊緣進行細化大小設置,更精確地反映實際結果,設置為2。結果狀態如圖2所示。
在 RV320減速器的使用中,擺線針輪受到曲軸施加的約束,所以在曲軸孔處施加約束,范圍為孔大小的一半面積,徑向約束方向為 UX 和 UY 。
4、RV減速器的模態分析結果與分析
計算模型得擺線輪各階的固有頻率如表2。
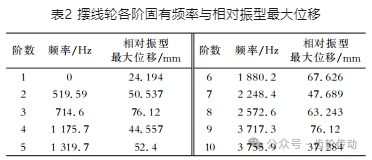
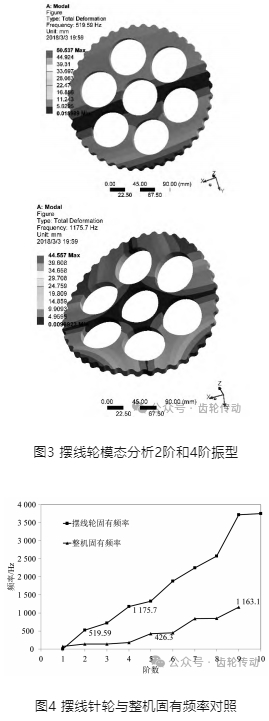
根據計算結果可以得出結論,擺線針輪的階數增加, 頻率也隨之變大。而查詢相關文獻本例所采用的 RV320 減速器的機體頻率為75.14 Hz,135.07 Hz,135.77 Hz, 178.48 Hz, 426.3 Hz, 451.63 Hz, 844.47 Hz, 847.065Hz,1163.1Hz(只抽取了前9階) 。經過對比 發現整機的固有頻率在第6階和第9階與擺線針輪計算的2 和4頻率如圖3所示,這時會產生共振現象。所以我們這里給出的修改建議是將擺線針輪的結構加強,通過增加肋板來使擺線針輪的頻率避開固有頻率,從而不會影響設備運轉。擺線輪的固有頻率和整機固有頻率對比如圖4所示。
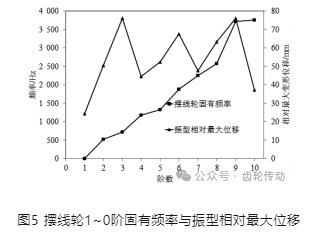
擺線輪在 RV 減速器傳動過程中,會有外力給他的激振頻率,根據公式(1):
式中,n為曲軸轉速;z3 為擺線針輪的齒數,得激振頻率f=544.07Hz。根據上文中得到的擺線針輪的頻率, 發現2階頻率與激勵頻率相近,這同樣也會造成共振的發生,根據公式我們可以將擺線針輪的齒數變大或變小,避開共振區間。如圖5所示為擺線輪隨著階數變化的頻率與振型相對最大位移變形圖。
5、結論
所以我們通過分析 RV 減速器擺線針輪的固有頻率, 將它與整機的固有頻率對比,發現可能出現的共振階數, 通過改變結構來規避此問題,又將該型號減速器的激 勵頻率與其固有頻率對比,發現只要改變齒數就可以避免發生共振。通過 RV 減速器擺線針輪的模態分析,對相關振動問題提供了一種解決思路,后續可通過實驗數據來做進一步分析。
參考文獻略.