行星齒輪傳動結構憑借其優秀的傳動性能早已在航空領域中得到廣泛應用。如何使行星齒輪傳動微小化便成為迫切的問題。在漸開線齒輪傳動中,將齒輪模數 m<1.0 mm 的齒輪稱為微型齒輪。微型行星齒輪傳動中各齒輪模數均小于 1 mm。微型行星齒輪傳動結構既具有總體質量小、效率高、傳動比大和同軸性好等優點,又具有總體占用空間小的優點。微型行星齒輪傳動結構憑借著諸多優點,已被廣泛應用于眾多領域,如航空航天設備、微型機器人和工業機械手臂等。
國外開始投入對微型行星齒輪減速結構的研究較早, 并對微型齒輪開展了較多的研究。SHIBAIKE 等研制了一種體積小、減速比大、可靠的微型行星齒輪減速器。21 世紀初期,我國生產的模數為 0.4~0.5 mm 的微型行星減速器的加工精度可以達到 7 級。近年來,國內科研工作者對微型行星齒輪進行了大量研究。饒振綱介紹了 3K 型微型行星齒輪傳動詳細的設計計算過程并研究了微型行星齒輪傳動模塊式組合設計。
微型行星減速結構可在較小空間內實現同軸差速傳動,具有較高的零件集成度,恰好符合新型航空產品輕量化和小型化的設計趨勢,有利于實現發動機減質量。但目前在航空發動機中應用較少,沒有較為成熟的產品,研究基礎較為薄弱,結構設計難度大,因此亟需開展微型行星減速結構的應用研究。本文提出一種用于某航空發動機中空氣渦輪起動機的微型行星傳動構型,并進行了方案設計和強度分析。
一、微型行星減速器構型設計
傳動類型與輪齒類型選擇
本文構型選用 2Z-X(A)型微型行星齒輪傳動,由太陽輪 a、齒圈 b、行星輪 c 和行星架 X 等組成。2Z-X(A)型行星齒輪傳動具有結構簡單、制造容易、外形尺寸小、質量小和傳動效率高等優點。
在對微型行星減速器所用輪齒類型進行選擇時,主要考慮使用直齒或斜齒。經過對兩者優缺點的對比后發現,斜齒輪相對直齒輪有承載能力更大等優點,但同時會帶來傳動過程中產生軸向力這一缺點。為了避免上述缺點,優選直齒行星齒輪傳動的形式。
太陽輪結構及其支承
為了避免減速器結構過于復雜以及保證可靠性要求,采用太陽輪和輸入軸一體加工的齒輪軸結構。在行星齒輪傳動中,因為各齒輪副的嚙合力呈軸線對稱作用,而且無徑向載荷,所以對于懸臂布置的太陽輪 a 也不會引起沿齒寬方向上的載荷集中現象,故選擇太陽輪 a 的懸臂布置是合理的。因為輸入軸轉速較高且存在較小軸向力,所以對輸入軸采用單列深溝球軸承支承。
行星架結構及其支承
為了降低加工難度,所設計的微型行星減速器選擇單側板式行星架結構。因為輸入軸轉速相對較高且存在較小軸向力,又考慮到減速器軸向尺寸限制,所以對行星架采用單列深溝球軸承支承。雙側板整體式行星架結構具有剛性好、行星輪安裝孔的同軸性好、行星輪載荷較為均勻和傳動精度高等優點,在所設計微型行星減速器空間 條件允許的情況下可以考慮使用雙側板整體式行星架。
齒圈結構
對于微型行星齒輪減速器,由于徑向尺寸的限制,故選擇將齒圈與減速器箱體通過粉末冶金一體成型,因為對于行星齒輪減速器,齒圈齒輪所受應力較小,所以選用粉末冶金一體成型加工技術可以滿足減速器使用要求。
二、微型行星減速器設計計算
所設計微型行星齒輪減速器原始數據為:傳動比 i=2. 9;減速器額定功率 P1 = 300 W,轉速 n1 = 26 000 r/ min。
配齒計算
2Z-X(A)型微型行星齒輪傳動比計算公式為
式中 p 為微型行星齒輪傳動的特性參數,且有p = 則內齒輪 b 的齒數zb為
則內齒輪 b 的齒數zb為
式(2)即為該微型行星齒輪傳動的配齒計算公式。在確定行星齒輪傳動的各輪齒數時,除了滿足給定的傳動比外,還應滿足與其裝配有關的條件,即同心條件、鄰接條件和安裝條件。
根據同心條件,a-c 齒輪副的嚙合中心距 a′ac 必須等于 b-c 齒輪副的嚙合中心距 a′bc,即 a′ac =a′bc。可以得到計算行星輪 c 齒數zc的計算公式為
上式是按照非變位或高度變位的同心條件 zb=za+2zc所得到的公式。
再考慮到 2Z-X(A)型微型行星齒輪傳動的安裝條件
將式(2)代入式(4),可得
綜合上述各公式,則可得 2Z-X(A)型微型行星傳動的配齒比例關系式為

由上述比例關系式(6)可知,對于 2Z-X(A) 型微型行星齒輪傳動,根據給定的傳動比ip值,再選定zc,便可求其zb和za,同時還可以檢驗它是否滿足安裝條件。
如果采用角度變位傳動時,行星輪 c 的齒數 zc應按下式計算:
當zb -za為偶數時,可取齒數修正量為 Δzc = -1。此時,通過角度變位后,既不增大該行星傳動的徑向尺寸,又可以改善a-c嚙合齒輪副的傳動性能。當zb-za為奇數時,則可取 Δzc= ±0.5,這樣就可以增多其可能的配齒方案數。
在此 2Z-X(A)型微型行星齒輪傳動中,選取可以滿足使用要求的 3 個行星輪,即np=3,所設計微型行星齒輪傳動的配齒結果如表 1 所示。
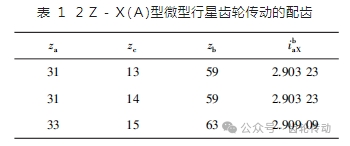
為了使該行星齒輪減速器的外廓尺寸盡可能小,故最終選定np=3,za=31,zc=14,zb=59。
幾何尺寸計算
微型齒輪是按照國標 GB2363—1990規定, 微型齒輪的模數范圍為 m<1.0 mm。模數 m 系列如下:第一系列為 0. 1,0. 12,0. 15,0. 2,0. 3,0. 4, 0.5,0.6,0.8;第二系列為 0.35,0.7,0.9。
按齒面接觸強度計算太陽輪的分度圓直徑為 d1= 6.283 6 mm,所以![]() 圓整后取 m = 0.3 mm。其余參數為:壓力角 α = 20°,齒頂高系數h∗a=1,頂隙系數c∗=0.35。
圓整后取 m = 0.3 mm。其余參數為:壓力角 α = 20°,齒頂高系數h∗a=1,頂隙系數c∗=0.35。
為了避免行星輪加工時產生根切現象以及圓整中心距便于裝配,本設計對齒輪進行角度變位處理。為了便于相關零件的設計和制造,本設計采用變位法將中心距就近湊配至a′= 6.90 mm。
變位齒輪副作無側隙嚙合時,其嚙合角按式(8)計算:

根據無側隙嚙合方程,可按式(9) 求得變位系數
齒頂高變動系數按式(10)計算:
式中:a 為齒輪副標準中心距,mm;α 為壓力角,其標準值為 20°;invα 為標準壓力角 α 的漸開線函數,且有 invα= tanα-α;invα′為嚙合角 α′的漸開線函數。
a-c 嚙合齒輪副變位計算相關參數如表 2 所示。
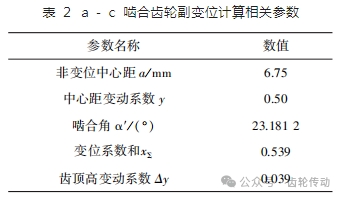
將變位系數和xΣ = 0.539 分配給大、小齒輪, 即xΣ = x2+x1。行星輪c 的變位系數為 x1 = 因行星輪 c 為輸出構件,則Δx=-0.04~0,取 Δx=0,可得x1=0.175 1,但是x1< xmin(0.176 5),所以調整行星輪 c 的變位系數xc=0.180,以此表示可以保證行星輪c不會產生根切。太陽輪a的變位系數為 xa=x2=xΣ-x1=0.359。
因行星輪 c 為輸出構件,則Δx=-0.04~0,取 Δx=0,可得x1=0.175 1,但是x1< xmin(0.176 5),所以調整行星輪 c 的變位系數xc=0.180,以此表示可以保證行星輪c不會產生根切。太陽輪a的變位系數為 xa=x2=xΣ-x1=0.359。
b-c 嚙合齒輪副變位計算相關參數如表 3 所示。
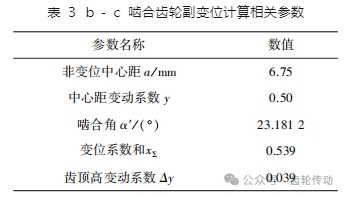
將變位系數和xΣ = 0.539 分配給大、小齒輪, 即xΣ = x2 -x1。行星輪 c 的變位系數為x1 = 0.180。內齒輪 b 的變位系數為xb=x2=xΣ+x1=0.719。
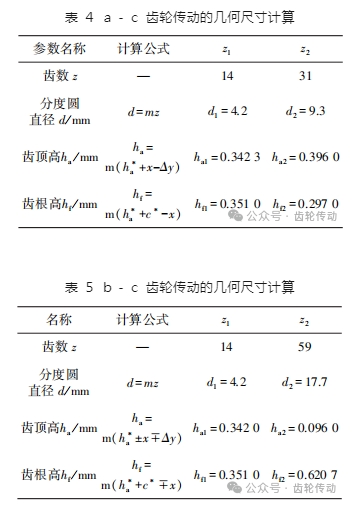
所設計微型行星齒輪傳動的幾何尺寸如表 4 和表 5 所示。
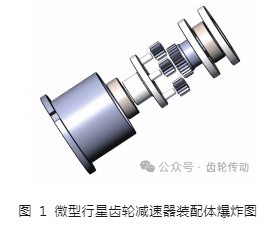
微型行星齒輪減速器裝配體爆炸圖如圖 1 所示。
三、微型行星減速器強度校核
在完成對微型行星齒輪減速器各零部件的設計計算后,采用有限元分析軟件 ANSYS 對其進行計算,以便對危險截面進行強度校核。
經過對減速器中齒輪的失效形式分析并最終選定,太陽輪 a 和行星輪 c 使用材料為 20CrMnTi, 進行滲碳淬火熱處理, 內齒輪 b 使用材料為 40CrMo,進行調質熱處理。上述兩種材料屬性如表 6 所示。

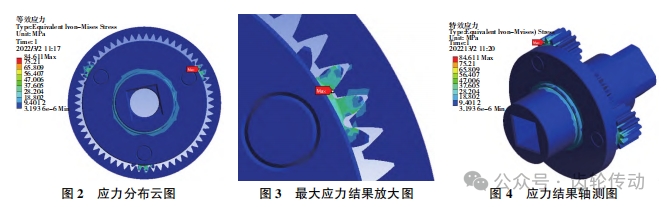
應力分布云圖、最大應力結果放大圖和應力結果軸測圖分別如圖 2、圖 3 和圖 4 所示。從圖 2 可以看出行星齒輪輪齒和輸出軸根部應力較大并且最大應力在行星齒輪根部,為84.611 MPa,小于行星輪許用齒根彎曲應力值 529 MPa,故行星輪齒根彎曲強度校核通過。從圖 4可以發現行星齒輪輪齒應力沿齒向分布不均勻程度較大,這主要是由于行星架結構采用的是單側板式行星架結構。所以如果所設計微型行星齒輪減速器空間條件允許的情況下,可以考慮使用雙側板整體式行星架。
四、微型行星減速器結構優化
從微型行星減速器強度校核結果中發現,行星輪齒根彎曲應力遠小于行星輪許用齒根彎曲應力值。所以所設計的微型行星減速器仍具有較大的優化空間,可縮小微型行星減速器體積,進而節省微型行星減速器所占空間。本節基于正交試驗法對微型行星減速器中危險零件行星輪進行參數優化,以微型行星減速器體積最小為優化目標,以行星輪齒根彎曲強度要求為約束條件。
正交試驗設計
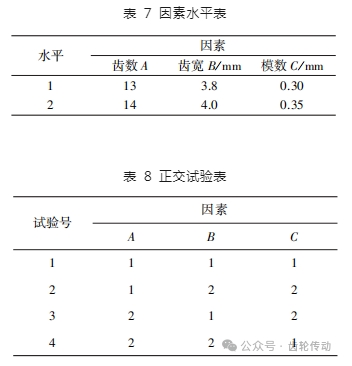
選取行星輪齒數、模數和齒寬 3 個參數作為正交試驗因素,每個影響因素取兩個水平,設計 L4(23)正交表,三因素水平表如表 7 所示,正交試驗表如表 8 所示。
試驗結果分析
根據微型行星減速器體積計算公式得到試驗結果,如表 9 所示。
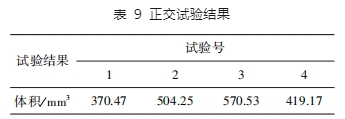
由表 9 可知, 行星輪最佳參數組合為 A1B1C1,即行星輪齒數為 13,齒寬為 3.8 mm,模數為 0.3 mm。優化后的行星輪在齒根彎曲強度滿足要求的前提下可以使得整個微型行星減速器體積減小 17.08%。
五、結語
本文設計了一種航空用微型行星傳動構型,完成了齒輪的配齒計算、幾何尺寸計算和受力分析工作,運用有限元分析軟件 ANSYS 對其重要零部件進行了強度校核,提出了減速器行星架在空間條件允許的情況下可以選用雙側板整體式行星架,并且基于正交試驗法對減速器結構進行進一步優化。本文可以為微型行星減速結構在航空發動機起動機等航空產品中的推廣與應用提供理論支撐。
參考文獻略.