一、項(xiàng)目背景
智能時(shí)代,齒輪天地,齒輪測量是一個(gè)看似古老而又充滿生機(jī)的研究方向,不管是從單一零部件測量還是組合系統(tǒng)整體來看,齒輪等具有復(fù)雜三維空間型面的高精度測量技術(shù)依然是非常有挑戰(zhàn)的。
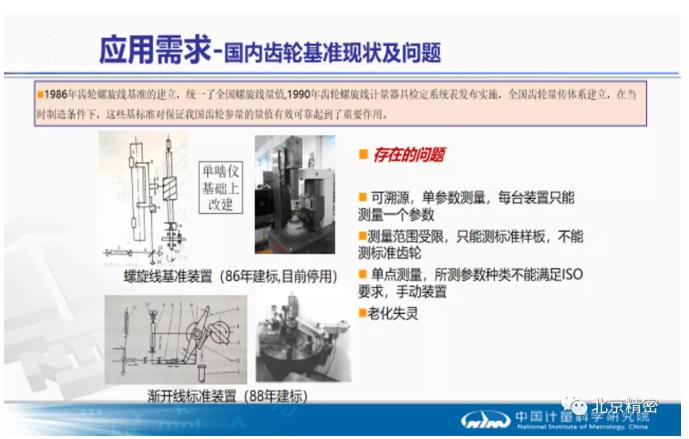
國家齒輪基標(biāo)準(zhǔn)體系由螺旋線基準(zhǔn)、漸開線標(biāo)準(zhǔn)和齒距標(biāo)準(zhǔn)三個(gè)單參數(shù)裝置和相應(yīng)的不同等級(jí)的量傳標(biāo)準(zhǔn)器組成,但原有的齒輪基標(biāo)準(zhǔn)裝置已老化無法工作。自2014年起我國齒輪產(chǎn)業(yè)規(guī)模位居全球第一,國內(nèi)齒輪制造面臨向中高端轉(zhuǎn)型的壓力,而齒輪基準(zhǔn)的研制及量傳體系的完善對保證國內(nèi)齒輪產(chǎn)品制造質(zhì)量和應(yīng)用量值準(zhǔn)確一致有重要作用,因此需要研制和制造相匹配的新的齒輪基準(zhǔn)裝置。

新的ISO齒輪標(biāo)準(zhǔn)中對齒輪和齒輪儀器提出了更高的精度要求,齒輪測量中心和坐標(biāo)測量機(jī)已成為齒輪制造現(xiàn)場主流設(shè)備,但其核心的多軸聯(lián)動(dòng)復(fù)雜曲面成型控制反饋和測量技術(shù)是不對國內(nèi)開放的。
二、方案創(chuàng)新與關(guān)鍵技術(shù)
齒輪基準(zhǔn)生成的標(biāo)準(zhǔn)量值需要滿足制造的要求:高精度、多參量綜合測量的溯源需求,又無法依靠國外技術(shù),因此立足自主研發(fā),建立新一代齒輪基準(zhǔn),提升國家現(xiàn)有齒輪基準(zhǔn)能力對保證國內(nèi)齒輪制造精度的準(zhǔn)確可靠和適應(yīng)新的國際標(biāo)準(zhǔn)要求具有非常重要的、基礎(chǔ)性的作用。
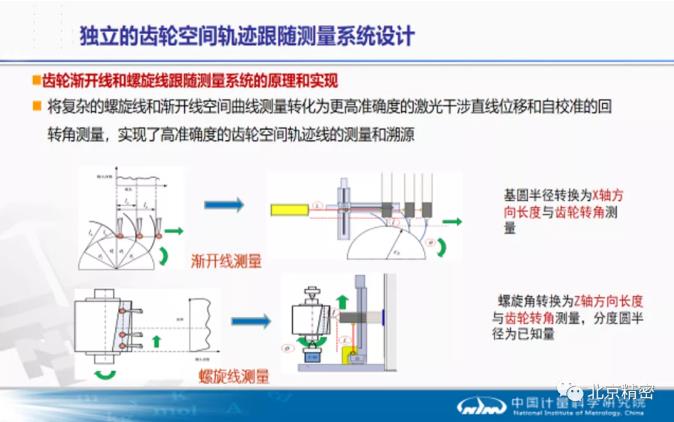
不同形成機(jī)理、不同空間方向的螺旋線和漸開線共存同一齒面,雖然空間幾何型面復(fù)雜,但可以抽象看作是長度尺寸、角度尺寸與形狀的復(fù)合測量。
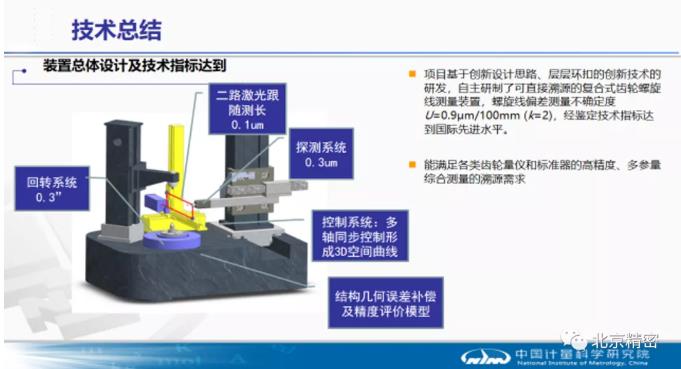
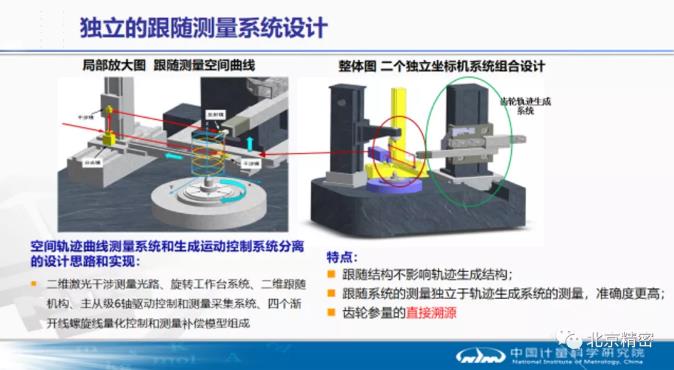
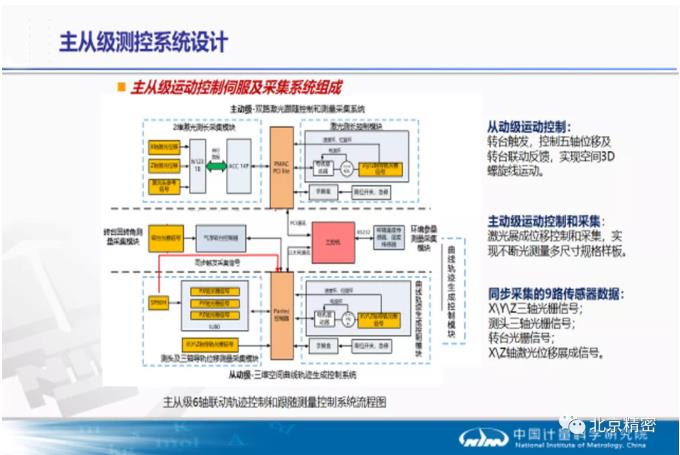
為了達(dá)到基準(zhǔn)高精度測量和直接溯源的目標(biāo),又為了規(guī)避商品類儀器修正模型不向國內(nèi)開放的限制,項(xiàng)目提出了空間軌跡曲線測量系統(tǒng)和生成運(yùn)動(dòng)控制系統(tǒng)分離的設(shè)計(jì)方案,整套裝置結(jié)構(gòu)在國內(nèi)加工和調(diào)試,其中空間軌跡生成運(yùn)動(dòng)控制系統(tǒng)采用了商用的坐標(biāo)機(jī)多軸聯(lián)動(dòng)控制方案和技術(shù),只用來做齒輪螺旋線和漸開線軌跡的生成,而齒輪測量和溯源的部分則由空間軌跡跟隨測量系統(tǒng)實(shí)現(xiàn),整個(gè)跟隨測量系統(tǒng)由項(xiàng)目獨(dú)立設(shè)計(jì)的二維激光干涉測量光路、自校準(zhǔn)回轉(zhuǎn)工作臺(tái)系統(tǒng)、二維跟隨機(jī)構(gòu)、主從級(jí)6軸驅(qū)動(dòng)控制和測量采集系統(tǒng)以及四個(gè)漸開線螺旋線量化控制和測量補(bǔ)償模型組成。從外觀結(jié)構(gòu)看,整套裝置變成了一個(gè)6軸坐標(biāo)系統(tǒng),空間軌跡跟隨測量系統(tǒng)被嵌套于齒輪空間軌跡生成系統(tǒng)(齒輪測量中心)內(nèi),但又相互分離。跟隨測量系統(tǒng)具備如下三個(gè)特點(diǎn):
跟隨系統(tǒng)按照項(xiàng)目研發(fā)的齒輪螺旋線漸開線空間展成模型設(shè)計(jì)路徑規(guī)劃,合理設(shè)置X/Z向直線位移與回轉(zhuǎn)角的不同步距,使得激光干涉直線位移光路能同步跟隨上按照齒輪空間軌跡線運(yùn)行的小反射鏡,并通過回轉(zhuǎn)臺(tái)的測量同步觸發(fā),實(shí)時(shí)同步采集激光干涉位移、回轉(zhuǎn)角位移和3D探測系統(tǒng)的微位移信號(hào),得到齒面軌跡實(shí)際測量信息,最后通過項(xiàng)目研發(fā)的齒輪螺旋線漸開線修正模型運(yùn)算得到齒輪空間軌跡實(shí)際擬合線及齒輪參量誤差。項(xiàng)目將復(fù)雜的螺旋線和漸開線空間曲線測量轉(zhuǎn)化為更高準(zhǔn)確度的激光干涉直線位移和自校準(zhǔn)的回轉(zhuǎn)角測量,實(shí)現(xiàn)了高準(zhǔn)確度的齒輪空間軌跡線的測量及齒輪參量的直接溯源。不采用控制生成系統(tǒng)中的多軸光柵尺的信號(hào)做測量,也就最大程度避免生成系統(tǒng)的多軸結(jié)構(gòu)幾何誤差對測量的影響。
跟隨路徑的控制與同步實(shí)時(shí)采集依賴于項(xiàng)目研發(fā)的主從級(jí)6軸聯(lián)動(dòng)驅(qū)動(dòng)控制和測量采集系統(tǒng),它由兩個(gè)既獨(dú)立又共同觸發(fā)關(guān)聯(lián)的控制模塊組成,一個(gè)是以商業(yè)Pantec為主控制器的齒輪軌跡線多軸聯(lián)動(dòng)控制模塊,另一個(gè)是以PMAC為主控制器的跟隨測量采集系統(tǒng)。軌跡生成和跟隨測量兩個(gè)模塊既相互獨(dú)立,又相互聯(lián)接,通過自校準(zhǔn)回轉(zhuǎn)臺(tái)的光柵信號(hào)作為觸發(fā)信號(hào)控制生成系統(tǒng)中的軌跡線生成和測量系統(tǒng)中跟隨測量信號(hào)同步。兩個(gè)模塊需要控制整個(gè)裝置中6個(gè)運(yùn)動(dòng)軸的驅(qū)動(dòng)和9路測量控制信號(hào)的采集。
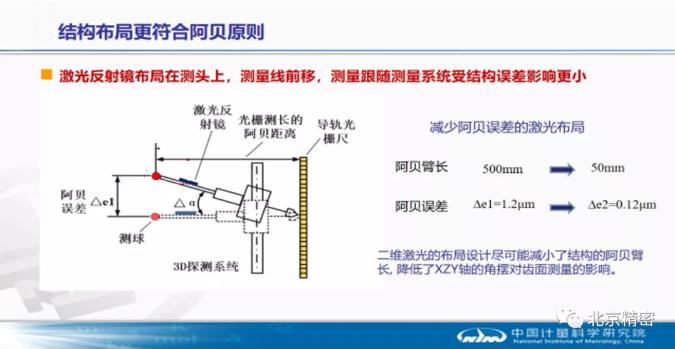
且二維激光光路經(jīng)過優(yōu)化設(shè)計(jì),將小反射鏡固定在3D探測系統(tǒng)的測桿上,實(shí)際的測量線從原來軌跡生成系統(tǒng)的導(dǎo)軌光柵尺布局的500mm處前移到了距離探測測頭的50mm處,結(jié)構(gòu)布局更符合阿貝原則,這樣當(dāng)儀器導(dǎo)軌角擺誤差同樣為0.5″時(shí),可以使齒面展成測長誤差從De1=1.2μm降低到De2=0.12μm,因此軌跡生成系統(tǒng)的三軸結(jié)構(gòu)誤差對齒輪參量測量結(jié)果的影響大大降低。
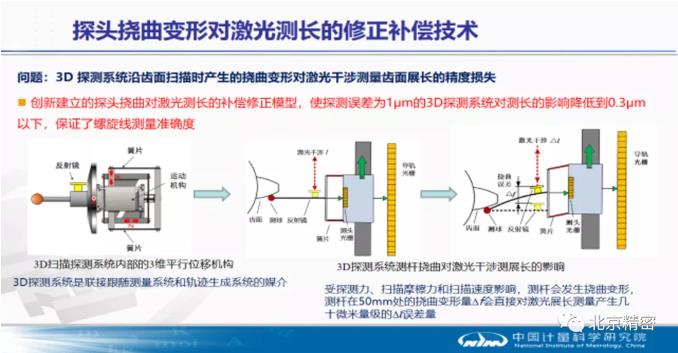
針對3D 探測系統(tǒng)沿齒面掃描時(shí)產(chǎn)生的撓曲變形對激光干涉測量齒面展長的精度損失問題,建立了激光測長補(bǔ)償技術(shù),使探測誤差為1μm的3D探測系統(tǒng)對測長的影響降低到0.3μm以下,保證了漸開線和螺旋線測量準(zhǔn)確度。
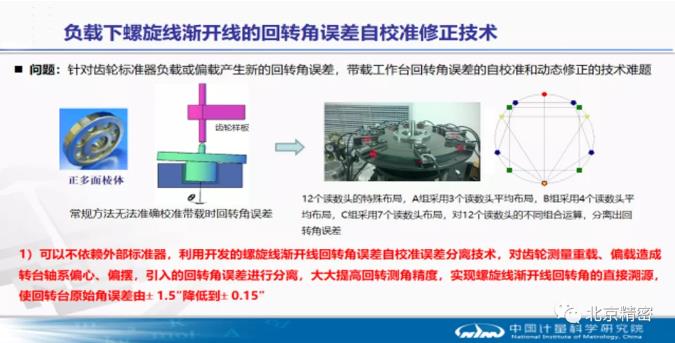
依據(jù)角度自封閉特性,實(shí)現(xiàn)了負(fù)載下螺旋線漸開線的回轉(zhuǎn)角誤差自校準(zhǔn)修正技術(shù),解決了工作臺(tái)旋轉(zhuǎn)運(yùn)行時(shí),由于螺旋線樣板或漸開線樣板由于自身重量或樣板結(jié)構(gòu)不對稱造成偏載,對回轉(zhuǎn)工作臺(tái)產(chǎn)生新的回轉(zhuǎn)角誤差的修正問題,在不使用外部角度標(biāo)準(zhǔn)器的條件下,使回轉(zhuǎn)臺(tái)原始角誤差由± 1.5″降低到± 0.15″,回轉(zhuǎn)角精度提高一個(gè)數(shù)量級(jí),有效提高了螺旋線漸開線的測量準(zhǔn)確度。
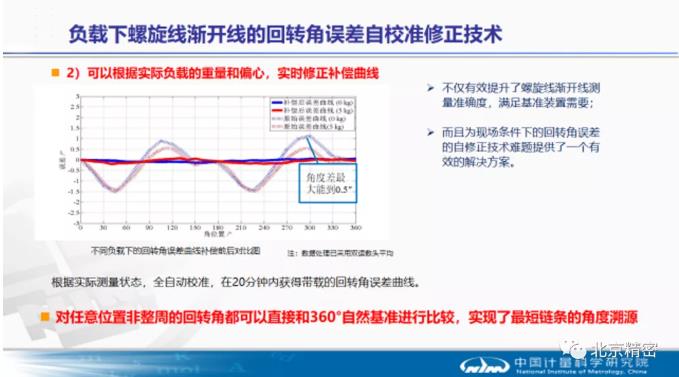
螺旋線漸開線展成的回轉(zhuǎn)角范圍在十幾度到一百多度,非整周運(yùn)動(dòng),例如螺旋角30°標(biāo)準(zhǔn)樣板的展成回轉(zhuǎn)角范圍是0°~80°,但自校準(zhǔn)技術(shù)通過整周多點(diǎn)布局采樣處理,使得各位置的角度自然封閉,這樣就可以把任意位置的回轉(zhuǎn)角都直接和360°這個(gè)自然基準(zhǔn)進(jìn)行比較,實(shí)現(xiàn)了最短鏈條的角度溯源。
帶載工作臺(tái)回轉(zhuǎn)角誤差的自校準(zhǔn)和動(dòng)態(tài)修正是在線測量的經(jīng)典技術(shù)難題。螺旋線基準(zhǔn)裝置可以根據(jù)被測標(biāo)準(zhǔn)樣板或標(biāo)準(zhǔn)齒輪實(shí)際負(fù)載的重量和偏心,實(shí)時(shí)修正補(bǔ)償回轉(zhuǎn)角誤差曲線。
僅以齒輪標(biāo)準(zhǔn)器放置前的0kg負(fù)載和放置標(biāo)準(zhǔn)器后的5kg負(fù)載為例,從下圖可看到不同負(fù)載下的回轉(zhuǎn)工作臺(tái)的角度誤差曲線是不同的,且角度差最大能到0.5″;而且無負(fù)載時(shí)的回轉(zhuǎn)角度偏差曲線并不是最小,實(shí)驗(yàn)結(jié)果的結(jié)論和常規(guī)認(rèn)知并不同,這是因?yàn)闅飧』剞D(zhuǎn)臺(tái)有負(fù)載設(shè)計(jì)要求,只有在最佳負(fù)載范圍內(nèi)才能達(dá)到最好的使用性能。而常規(guī)的修正補(bǔ)償技術(shù)只能在無負(fù)載的理想情況下進(jìn)行,用無負(fù)載的補(bǔ)償曲線修正計(jì)算帶載下的回轉(zhuǎn)角,可能會(huì)造成更大的誤差。
新一代螺旋線基準(zhǔn)裝置在研究齒輪空間幾何曲線綜合測量和溯源方法的基礎(chǔ)上,設(shè)計(jì)并實(shí)現(xiàn)了雙激光干涉光路用于空間復(fù)雜型面--漸開線及螺旋線的測量技術(shù)、帶載回轉(zhuǎn)工作臺(tái)角度自校準(zhǔn)修正技術(shù)、三維探測掃描系統(tǒng)撓曲補(bǔ)償技術(shù)、主從級(jí)閉環(huán)多軸聯(lián)動(dòng)驅(qū)動(dòng)控制和測量技術(shù)等多個(gè)儀器關(guān)鍵單元技術(shù),成功研制了可直接溯源的復(fù)合式齒輪螺旋線測量裝置,螺旋線偏差測量不確定度U=0.9μm/100mm (k=2),經(jīng)技術(shù)鑒定及國際比對驗(yàn)證,螺旋線測量能力及技術(shù)指標(biāo)達(dá)到國際先進(jìn)水平。
項(xiàng)目從裝置研制到國家基準(zhǔn)的授權(quán),歷經(jīng)9年積累,從無到有,突破了幾何量測量儀器設(shè)計(jì)多個(gè)技術(shù)瓶頸,建立了新一代齒輪螺旋線基準(zhǔn)裝置,從質(zhì)量保證的最高源頭進(jìn)行技術(shù)創(chuàng)新和能力提升,完善了國家齒輪量傳體系,提升了我國齒輪螺旋線校準(zhǔn)測量能力,齒輪標(biāo)準(zhǔn)量值通過各校準(zhǔn)機(jī)構(gòu)的量傳和校準(zhǔn)服務(wù)的輻射,確保了國內(nèi)齒輪量儀和齒輪加工的量值準(zhǔn)確性和一致性。項(xiàng)目已獲國家市場監(jiān)管總局科研成果獎(jiǎng)二等獎(jiǎng)。